Learning Math/CS/Engineering Design with Robotics
Build Your Own Robot Machine
Lesson Description
|
You will build your own robot machine using the Linkbots and other hardware parts. You can build a sample robot, or you can try building your own robot machine.
|
Example 1: Challenge #1: Build a Crawl Bot
Parts Used in this Project
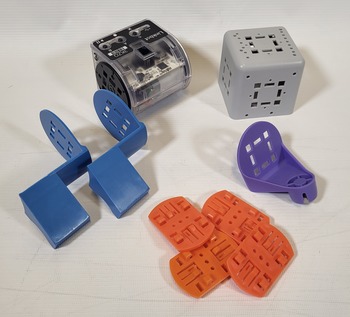 Instructions 1. Attach a Gripper to each motor of the Linkbot with a Snap Connector. 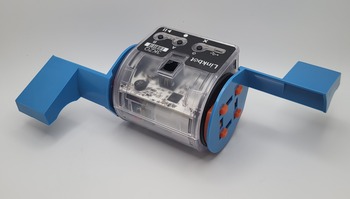 2. Attach a Cube Connector to the back of the Linkbot. Attach a purple Ball Caster to the end of the Cube. 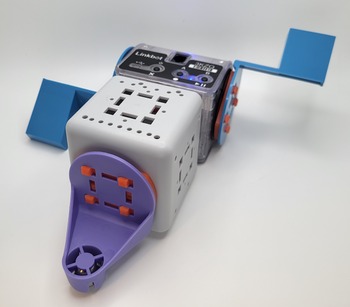 |