Learning Math with Robotics
Design and Build Your Own Robot Machines
Lesson Description
|
You will design and build your own robot machines using the Linkbots, OmniBot, and other hardware parts. You can build the sample robot, or you can try building your own robot machines.
|
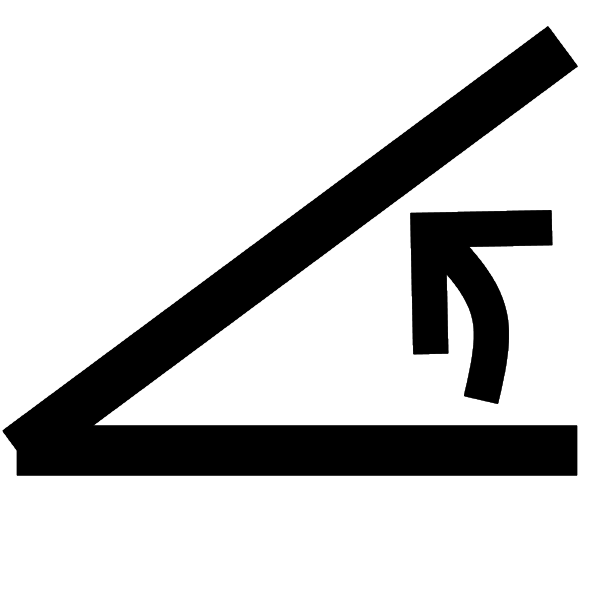
Example 1: Challenge #1: Build a Crawl Bot
| Introduction
In this activity you with be creating the Crawl Bot, a robot that is capable of moving without using wheels. This robot will utilize the gripper pair to drag itself across our activity mats.
Parts Used in this Project
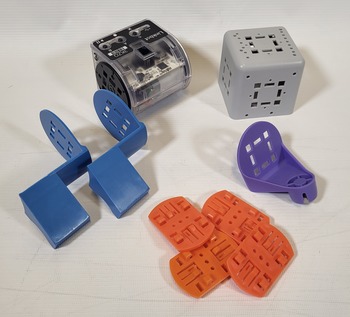 Instructions 1. Attach a Gripper to each motor of the Linkbot with a Snap Connector. 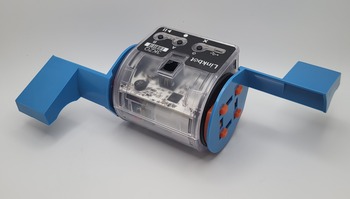 2. Attach a Cube Connector to the back of the Linkbot. Attach a purple Ball Caster to the end of the Cube. 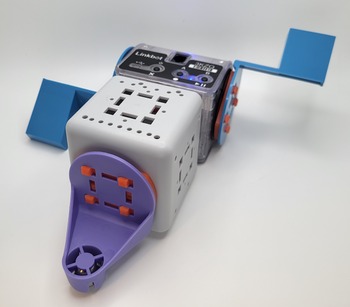 |