Download
Announcement
RoboBlocky Release Notes
Linkbot Labs Release Notes
Linkbot IDE Release Notes
Portal
Documents
Curriculum
Favorites
Edit Favorites
File
My Classes
Sign In
Learning Math/CS/Engineering Design with Robotics
Robotics Level 2
Lessons
Activities
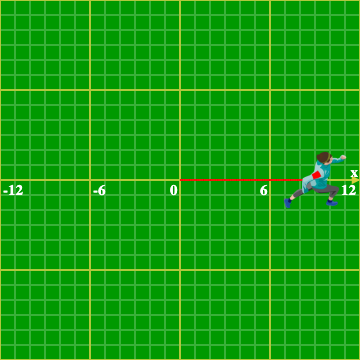
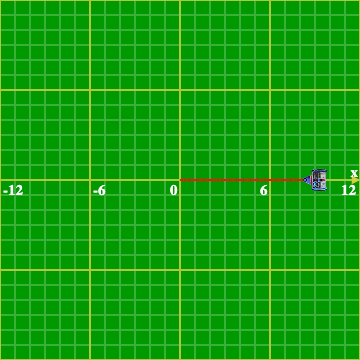
Drive Distance: Driving a Robot a Specified Distance
a
Set the Robot Speed [setSpeed()]
a
Drive Robot for a Specified Amount of Time [driveTime()]
a
Drive Angle: Drive a Robot by Turning the Wheels [driveAngle()]
a
Turn Left and Right
a
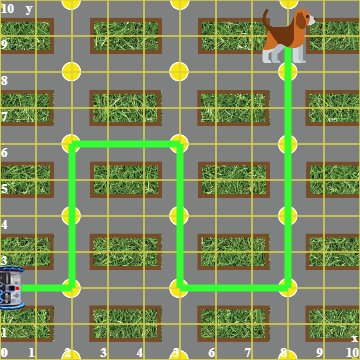
Walk the Dogs
a
Robot Models
Robot Size
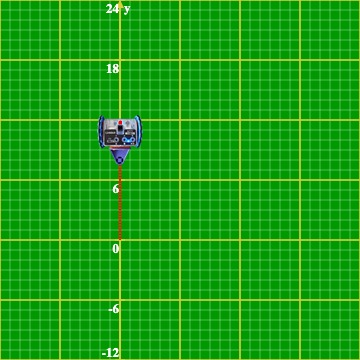
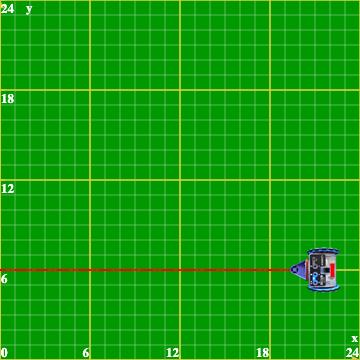
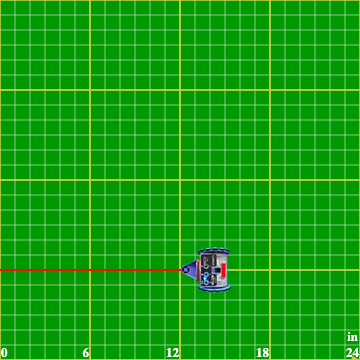
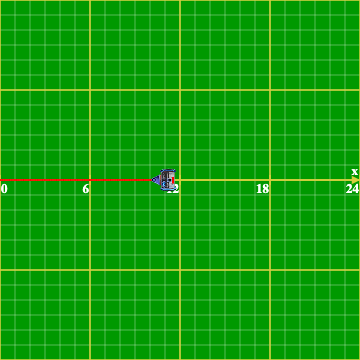
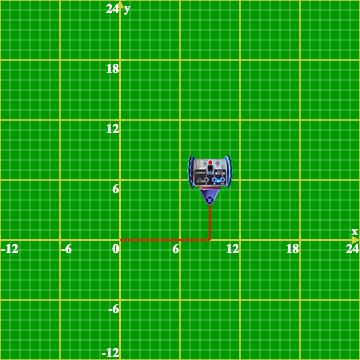
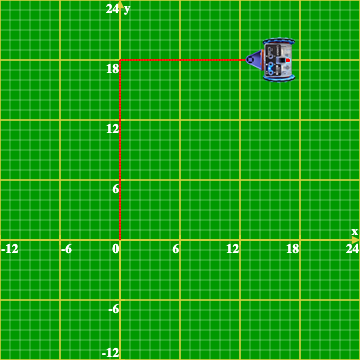
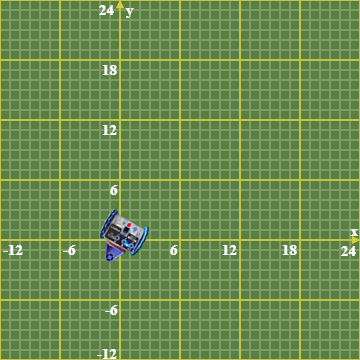
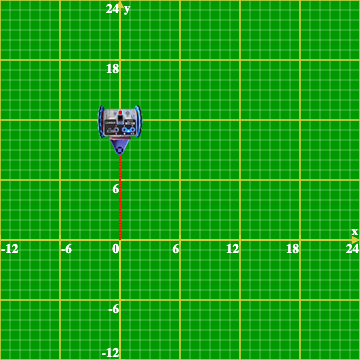
Drive to Point (x, y) on the Grid [drivexyTo(), drivexy()]
a
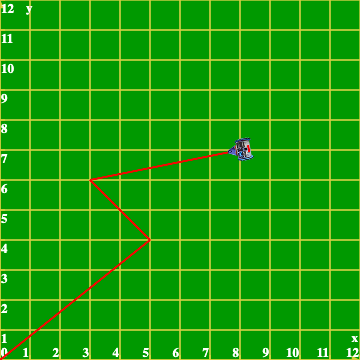
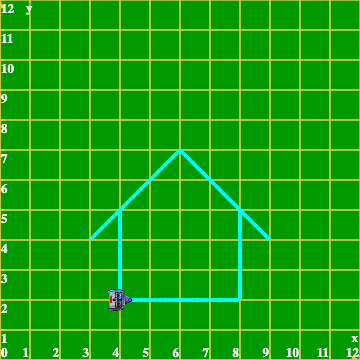
Draw Patterns with the Robot
a
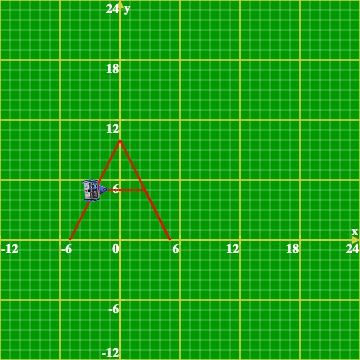
Draw the Letter "A"
a
Multiple Robots: Controlling Multiple Robots One at a Time
a
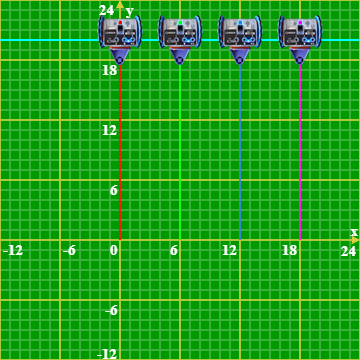
Move Multiple Robots at Same Time [driveDistanceNB(), turnLeftNB(), turnRightNB(), moveWait()]
a
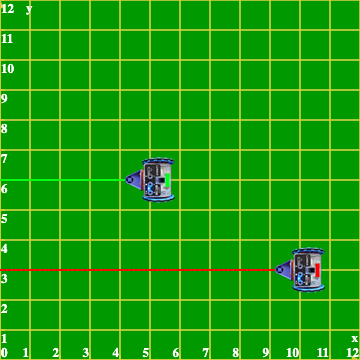
Robots Chasing Each Other in a Line
a
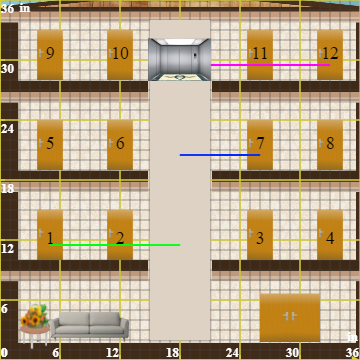
Choose the Hotel Rooms
P
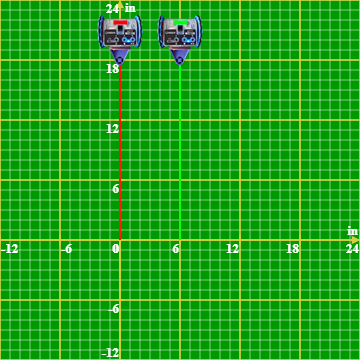
Arrive at the Same Location by Changing the Initial Position and Angle
a
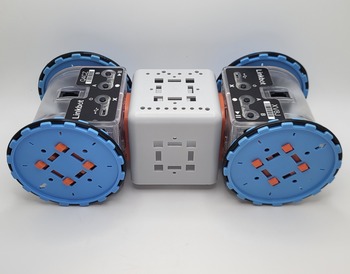
Robot Machine: 4-Wheel-Drive Vehicle
a
Robot Machine: 4-Wheel-Drive Ambulance (3-12)
H
Get the Current Location of a Robot [getxy(), getposition()]
a
Get the Location and Angle of a Robot and Output to the User
a
Get Joint Angle of Robot's Wheels [getJointAngle()]
a